汽车倒车雷达设计论文参考_汽车倒车雷达设计论文参考资料
接下来,我将针对汽车倒车雷达设计论文参考的问题给出一些建议和解答,希望对大家有所帮助。现在,我们就来探讨一下汽车倒车雷达设计论文参考的话题。
1.汽车倒车雷达四个探头安装距离如何确定
2.汽车倒车雷达的工作原理是什么?
3.关于汽车倒车雷达的相关书籍!
4.倒车 雷达 怎么样
5.倒车雷达如何使用
6.汽车倒车雷达的组成是什么?
汽车倒车雷达四个探头安装距离如何确定
利用路面参照物判断。最原始也是最有效的办法就是,找出参考点,牢记参考点的办法。具体来说,就是调整好车辆座椅,保持端正坐姿,然后让别人在车后30公分、50公分、100公分、150公分的地方竖起竿子,并在地面画出这些距离的线条。
之后,在车上通过后视镜观察竿子和地面线条对应的参照物,记住这些参考点,这样就能比较正确地把握距离了。当然,这需要你反复观察记忆,才能熟练掌握,最终转化成能力。
扩展资料倒车雷达安置的注意事项
1、 倒车雷达的探头应该与主机盒上插孔逐一对应,不克不及插错,不然大概引起非正常报警。
2、探头、喇叭、摄像头、视频输出等线材严禁重压,防备断裂大概短路; |探头安置不克不及过紧。
3、应连结倒车雷达在一个滋扰较低的位置,不然大概引起探测不敏捷大概不克不及正常事情。
倒车雷达在倒车时,利用超声波原理,由装置在车尾保险杠上的探头发送超声波撞击障碍物后反射此声波,计算出车体与障碍物间的实际距离,然后提示给司机,使停车或倒车更容易、更安全。
汽车倒车雷达的工作原理是什么?
1. 智能压力传感器系统设计 2. 智能定时器 3. 液位控制系统设计 4. 液晶控制模块的制作 5. 嵌入式激光打标机运动控制卡软件系统设计 6. 嵌入式激光打标机运动控制卡硬件系统设计 7. 基于单片机控制的数字气压计的设计与实现 8. 基于MSC1211的温度智能温度传感器 9. 机器视觉系统 10. 防盗与恒温系统的设计与制作 11. 防盗报警器 12. AT89S52单片机实验系统的开发与应用 13. 在单片机系统中实现SCR(可控硅)过零控制 14. 微电阻测量系统 15. 基于单片机的电子式转速里程表的设计 16. 基于GSM短信模块的家庭防盗报警系统 17. 公交车汉字显示系统 18. 基于单片机的智能火灾报警系统 19. WIN32环境下对PC机通用串行口通信的研究及实现 20. FIR数字滤波器的MATLAB设计与实现方法研究 21. 无刷直流电机数字控制系统的研究与设计 22. 直线电机方式的地铁模拟地铁系统制作 23. 稳压电源的设计与制作 24. 线性直流稳压电源的设计 25. 基于CPLD的步进电机控制器 26. 全自动汽车模型的设计制作 27. 单片机数字电压表的设计 28. 数字电压表的设计 29. 计算机比值控制系统研究与设计 30. 模拟量转换成为数字量的红外传输系统 31. 液位控制系统研究与设计 32. 基于89C2051 IC卡读/写器的设计 33. 基于单片机的居室安全报警系统设计 34. 模拟量转换成为数字量红外数据发射与接收系统 35. 有源功率因数校正及有源滤波技术的研究 36. 全自动立体停车场模拟系统的制作 37. 基于I2C总线气体检测系统的设计 38. 模拟量处理为数字量红外语音传输接收系统的设计 39. 精密VF转换器与MCS-51单片机的接口技术 40. 电话远程监控系统的研究与制作 41. 基于UCC3802的开关电源设计 42. 串级控制系统设计 43. 分立式生活环境表的研究与制作(多功能电子万年历) 44. 高效智能汽车调节器 45. 变速恒频风力发电控制系统的设计 46. 全自动汽车模型的制作 47. 信号源的设计与制作 48. 智能红外遥控暖风机设计 49. 基于单片控制的交流调速设计 50. 基于单片机的多点无线温度监控系统 51. 蔬菜公司恒温库微机监控系统 52. 数字触发提升机控制系统 53. 农业大棚温湿度自动检测 54. 无人监守点滴自动监控系统的设计 55. 积分式数字电压表设计 56. 智能豆浆机的设计 57. 采用单片机技术的脉冲频率测量设计 58. 基于DSP的FIR滤波器设计 59. 基于单片机实现汽车报警电路的设计 60. 多功能数字钟设计与制作 61. 超声波倒车雷达系统硬件设计 62. 基于AT89C51单片机的步进电机控制系统 63. 模拟电梯的制作 64. 基于单片机程控精密直流稳压电源的设计 65. 转速、电流双闭环直流调速系统设计 66. 噪音检测报警系统的设计与研究 67. 转速闭环(V-M)直流调速系统设计 68. 基于单片机的多功能函数信号发生器设计 69. 基于单片机的超声波液位测量系统的设计 70. 仓储用多点温湿度测量系统 71. 基于单片机的频率计设计 72. 基于DIMM嵌入式模块在智能设备开发中的应用 73. 基于DS18B20的多点温度巡回检测系统的设计 74. 计数及数码显示电路的设计制作 75. 矿井提升机装置的设计 76. 中频电源的设计 77. 数字PWM直流调速系统的设计 78. 开关电源的设计 79. 基于ARM的嵌入式温度控制系统的设计 80. 锅炉控制系统的研究与设计 81. 智能机器人的研究与设计 ——\u001F自动循轨和语音控制的实现 82. 基于CPLD的出租车计价器设计——软件设计 83. 声纳式高度计系统设计和研究 84. 集约型无绳多元心脉传感器研究与设计 85. CJ20-63交流接触器的工艺与工装 86. 六路抢答器设计 87. V-M双闭环不可逆直流调速系统设计 88. 机床润滑系统的设计 89. 塑壳式低压断路器设计 90. 直流接触器设计 91. SMT工艺流程及各流程分析介绍 92. 大棚温湿度自动控制系统 93. 基于单片机的短信收发系统设计 ――硬件设计 94. 三层电梯的单片机控制电路 95. 交通灯89C51控制电路设计 96. 基于D类放大器的可调开关电源的设计 97. 直流电动机的脉冲调速 98. 红外快速检测人体温度装置的设计与研制 99. 基于8051单片机的数字钟 100. 48V25A直流高频开关电源设计 101. 动力电池充电系统设计 102. 多电量采集系统的设计与实现 103. PWM及单片机在按摩机中的应用 104. IC卡预付费煤气表的设计 105. 基于单片机的电子音乐门铃的设计 106. 基于单片机的温湿度测量系统设计 107. 基于单片机的简易GPS定位信息显示系统设计 108. 基于单片机的简单数字采集系统设计 109. 大型抢答器设计 110. 新型出租车计价器控制电路的设计 111. 500kV麻黄线电磁环境影响计算分析 112. 单片机太阳能热水器测控仪的设计 113. LED点阵显示屏-软件设计 114. 双容液位串级控制系统的设计与研究 115. 三电平Buck直流变换器主电路的研究 116. 基于PROTEUS软件的实验板仿真 117. 基于16位单片机的串口数据采集 118. 电机学课程CAI课件开发 119. 单片机教学实验板——软件设计 120. PN结(二极管)温度传感器性能的实验研究 121. 微电脑时间控制器的软件设计 122. 基于单片机AT89S52的超声波测距仪的研制 123. 硼在TLP扩散连接中的作用机理研究 124. 多功能智能化温度测量仪设计 125. 电网系统对接地电阻的智能测量 126. 基于数字采样法的工频电参数测量系统的设计 127. 动平衡检测系统的设计 128. 非正弦条件下电参测量的研究 129. 频率测量新原理的研究 130. 基于LABVIEW的人体心率变异分析测量 131. 学校多功能厅音响系统的设计与实现 132. 利用数字电路实现电子密码锁 133. 矩形微带天线的设计 134. 简易逻辑仪的分析 135. 无线表决系统的设计 136. 110kV变电站及其配电系统的设计 137. 10KV变电所及低压配电系统设计 138. 35KV变电所及低压配电系统设计 139. 6KV配电系统及车间变电所设计 140. 交流接触器自动化生产流水线设计 141. 63A三极交流接触器设计 142. 100A交流接触器设计 143. CJ20—40交流接触器工艺及工装设计 144. JSS型数字式时间继电器设计 145. 半导体脱扣器的设计 146. 12A交流接触器设计 147. CJ20-100交流接触器装配线设计 148. 真空断路器的设计 149. 总线式智能PID控制仪 150. 自动售报机的设计 151. 小型户用风力发电机控制器设计 152. 断路器的设计 153. 基于MATLAB的水轮发电机调速系统仿真 154. 数控缠绕机树脂含量自控系统的设计 155. 软胶囊的单片机温度控制(硬件设计) 156. 空调温度控制单元的设计 157. 基于人工神经网络对谐波鉴幅 158. 基于单片机的鱼用投饵机自动控制系统的设计 159. 基于MATLAB的调压调速控制系统的仿真研究 160. 锅炉汽包水位控制系统 161. 基于单片机的无刷直流电机控制系统设计 162. 煤矿供电系统的保护设计——硬件电路的设计 163. 煤矿供电系统的保护设计——软件设计 164. 大容量电机的温度保护——软件设计 165. 大容量电机的温度保护 ——硬件电路的设计 166. 模块化机器人控制器设计 167. 电子式热分配表的设计开发 168. 中央冷却水温控制系统 169. 基于单片机的玻璃管加热控制系统设计 170. 基于AT89C51单片机的号音自动播放器设计 171. 基于单片机的普通铣床数控化设计 172. 基于AT89C51单片机的电源切换控制器的设计 173. 基于51单片机的液晶显示器设计 174. 手机电池性能检测 175. 自动门控制系统设计 176. 汽车侧滑测量系统的设计 177. 超声波测距仪的设计及其在倒车技术上的应用 178. 篮球比赛计时器设计 179. 基于单片机控制的红外防盗报警器的设计 180. 智能多路数据采集系统设计 181. 继电器保护毕业设计 182. 电力系统电压频率紧急控制装置研究 183. 用单片机控制的多功能门铃 184. 全氢煤气罩式炉的温度控制系统的研究与改造 185. 基于ATmega16单片机的高炉透气性监测仪表的设计 186. 基于MSP430的智能网络热量表 187. 火电厂石灰石湿法烟气脱硫的控制 188. 家用豆浆机全自动控制装置 189. 新型起倒靶控制系统的设计与实现 190. 软开关技术在变频器中的应用 191. 中频感应加热电源的设计 192. 智能小区无线防盗系统的设计 193. 智能脉搏记录仪系统 194. 直流开关稳压电源设计 195. 用单片机实现电话远程控制家用电器 196. 无线话筒制作 197. 温度检测与控制系统 198. 数字钟的设计 199. 汽车尾灯电路设计 200. 篮球比赛计时器的硬件设计 201. 公交车报站系统的设计 202. 频率合成器设计 203. 基于RS485总线的远程双向数据通信系统的设计 204. 宾馆客房环境检测系统 205. 智能充电器的设计与制作 206. 基于单片机的电阻炉温度控制系统设计 207. 单片机控制的PWM直流电机调速系统的设计 208. 遗传PID控制算法的研究 209. 模糊PID控制器的研究及应用 210. 楼宇自动化系统的设计与调试 211. 基于AT89C51单片机控制的双闭环直流调速系统设计212. 基于89C52的多通道采集卡的设计 213. 单片机自动找币机械手控制系统设计 214. 单片机控制PWM直流可逆调速系统设计 215. 单片机电阻炉温度控制系统设计 216. 步进电机实现的多轴运动控制系统 217. IC卡读写系统的单片机实现 218. 基于单片机的户式中央空调器温度测控系统设计 219. 基于单片机的乳粉包装称重控制系统设计 220. 18B20多路温度采集接口模块 221. 基于单片机防盗报警系统的设计 222. 基于MAX134与单片机的数字万用表设计 223. 数字式锁相环频率合成器的设计 224. 集中式干式变压器生产工艺控制器 225. 小型数字频率计的设计 226. 可编程稳压电源 227. 数字式超声波水位控制器的设计 228. 基于单片机的室温控制系统设计 229. 基于单片机的车载数字仪表的设计 230. 单片机的水温控制系统 231. 数字式人体脉搏仪的设计 232. I2C总线数据传输应用研究(硬件部分) 233. STV7697在显示驱动电路系统中的应用(软件设计)234. LED字符显示驱动电路(软件部分) 235. 智能恒压充电器设计 236. 基于单片机的定量物料自动配比系统 237. 现代发动机自诊断系统探讨 238. 基于单片机的液位检测 239. 基于单片机的水位控制系统设计 240. FFT在TMS320C54XDSP处理器上的实现 241. 基于模拟乘法器的音频数字功率设计 242. 正弦稳态电路功率的分析 243. 基于Multisim三相电路的仿真分析 244. 他励直流电动机串电阻分级启动虚拟实验 245. 并励直流电动机串电阻三级虚拟实验 246. 基于80C196MC交流调速实验系统软件的设计与开发 247. 基于VDMOS调速实验系统主电路模板的设计与开发 248. 基于Matlab的双闭环PWM直流调速虚拟实验系统 249. 基于IGBT-IPM的调速实验系统驱动模板的设计与开发 250. 基于87C196MC交流调速系统主电路软件的设计与开发 251. HEF4752为核心的交流调速系统控制电路模板的设计与开发 252. 基于87C196MC交流调速实验系统软件的设计与开发 253. 87C196MC单片机最小系统单路模板的设计与开发 254. MOSFET管型设计开关型稳压电源 255. 电子密码锁控制电路设计 256. 基于单片机的数字式温度计设计 257. 智能仪表用开关电源的设计 258. 遥控窗帘电路的设计 259. 双闭环直流晶闸管调速系统设计 260. 三路输出180W开关电源的设计 261. 多点温度数据采集系统的设计 262. 列车测速报警系统 263. PIC单片机在空调中的应用 264. 基于单片机的温度采集系统设计 265. 基于单片机89C52的啤酒发酵温控系统 266. 基于MCS-51单片机温控系统设计的电阻炉 267. 基于单片机的步进电机控制系统 268. 新颖低压万能断路器 269. 万年历可编程电子钟控电铃 270. 数字化波形发生器的设计 271. 高压脉冲开关电源 272. 基于MCS-96单片机的双向加力式电子天平 273. 语音控制小汽车控制系统设计 274. 智能型客车超载检测系统的设计 275. 热轧带钢卷取温度反馈控制器的设计 276. 直流机组电动机设计 277. 龙门刨床驱动系统的设计 278. 基于单片机的大棚温、湿度的检测系统 279. 微波自动门 280. 基于DS18B20温度传感器的数字温度计设计 281. 节能型电冰箱研究 282. 交流异步电动机变频调速设计 283. 基于单片机控制的PWM调速系统 284. 基于单片机的数字温度计的电路设计 285. 基于Atmel89系列芯片串行编程器设计 286. 基于单片机的实时时钟 287. 基于MCS-51通用开发平台设计 288. 基于MP3格式的单片机音乐播放系统 289. 基于单片机的IC卡智能水表控制系统设计 290. 基于MATLAB的FIR数字滤波器设计 291. 单片机水温控制系统 292. 110kV区域降压变电所电气系统的设计 293. ATMEIL AT89系列通用单片机编程器的设计 294. 基于单片机的金属探测器设计 295. 双闭环三相异步电动机串级调速系统 296. 基于单片机技术的自动停车器的设计 297. 单片机电器遥控器的设计 298. 自动剪板机单片机控制系统设计 299. 蓄电池性能测试仪设计 300. 电气控制线路的设计原则 301. 无线比例电机转速遥控器的设计 302. 简易数字电子称设计 303. 红外线立体声耳机设计 304. 单片机与PC串行通信设计 305. 100路数字抢答器设计 306. D类功率放大器设计 307. 铅酸蓄电池自动充电器 308. 数字温度测控仪的设计 309. 下棋定时钟设计 310. 温度测控仪设计 311. 数字频率计 312. 数字集成功率放大器整体电路设计 313. 数字电容表的设计 314. 数字冲击电流计设计 315. 数字超声波倒车测距仪设计 316. 路灯控制器 317. 扩音机的设计 318. 交直流自动量程数字电压表 319. 交通灯控制系统设计 320. 简易调频对讲机的设计 321. 峰值功率计的设计 322. 多路温度采集系统设计 323. 多点数字温度巡测仪设计 324. 电机遥控系统设计 325. 由TDA2030A构成的BTL功率放大器的设计 326. 超声波测距器设计 327. 4-15V直流电源设计 328. 家用对讲机的设计 329. 流速及转速电路的设计 330. 基于单片机的家电远程控制系统设计 331. 万年历的设计 332. 单片机与计算机USB接口通信 333. LCD数字式温度湿度测量计 334. 逆变电源设计 335. 基于单片机的电火箱调温器 336. 表面贴片技术SMT的广泛应用及前景 337. 中型电弧炉单片机控制系统设计 338. 中频淬火电气控制系统设计 339. 新型洗浴器设计 340. 新型电磁开水炉设计 341. 基于电流型逆变器的中频冶炼电气设计 342. 6KW电磁采暖炉电气设计 343. 64点温度监测与控制系统 344. 电力市场竞价软件设计 345. DS18B20温度检测控制 346. 步进电动机驱动器设计 347. 多通道数据采集记录系统 348. 单片机控制直流电动机调速系统 349. IGBT逆变电源的研究与设计 350. 软开关直流逆变电源研究与设计 351. 单片机电量测量与分析系统 352. 温湿度智能测控系统 353. 现场总线控制系统设计 354. 加热炉自动控制系统 355. 电容法构成的液位检测及控制装置 356. 基于CD4017电平显示器 357. 无线智能报警系统 358. 可编程的LED(16×64)点阵显示屏 359. 多路智力抢答器设计 360. 8×8LED点阵设计 361. 电子风压表设计 362. 智能定时闹钟设计 363. 数字音乐盒设计 364. 数字温度计设计 365. 数字定时闹钟设计 366. 数字电压表设计 367. 计算器模拟系统设计 368. 定时闹钟设计 369. 电子万年历设计 370. 电子闹钟设计 371. 单片机病房呼叫系统设计 372. 家庭智能紧急呼救系统的设计 373. 自动车库门的设计 374. 异步电动机功率因数控制系统的研究 375. 普通模拟示波器加装多功能智能装置的设计 376. 步进电机运行控制器的设计 377. 80C196MC控制的交流变频调速系统设计 378. 汽车防盗系统 379. 简易远程心电监护系统 380. 智能型充电器的电源和显示的设计 381. 电气设备的选择与校验 382. 论供电系统中短路电流及其计算 383. 论工厂的电气照明 384. 论无线通信技术热点及发展趋势 385. 浅论10KV供电系统的继电保护的设计方案 386. 试论供电系统中的导体和电器的选择 387. 大棚仓库温湿度自动控制系统 388. 自行车车速报警系统 389. 智能饮水机控制系统 390. 基于单片机的数字电压表设计 391. 多用定时器的电路设计与制作 392. 智能编码电控锁设计 393. 串联稳压电源的设计 394. 红外恒温控制器的设计与制作 395. 自行车里程,速度计的设计 396. 等精度频率计的设计 397. 浮点数运算FPGA实现 398. 人体健康监测系统设计 399. 基于单片机的音乐喷泉控制系统设计 400. 基于LabVIEW的虚拟频谱分析仪的研究与设计 401. 感应式门铃的设计与制作 402. 电子秤设计与制作 403. 电动车三段式充电器 404. SB140肖特基二极管制造与检测 405. SMT技术 406. 基于单片机的温度测量系统的设计 407. 龙门刨床的可逆直流调速系统的设计 408. 公交车站自动报站器的设计 409. 单片机波形记录器的设计 410. 音频信号分析仪 411. 基于单片机的机械通风控制器设计
关于汽车倒车雷达的相关书籍!
您好,首先倒车雷达的组成及各部件的作用是什么倒车雷达的组成及各部件作用如下:
(1)超声波传感器用于发射及接收超声波信号,并可完成距离的测量。
(2)主机发射正弦波脉冲给超声波传感器,并处理其接收到的信号,并且换算出距离值,然后将数据传送给显示器。
(3)显示器或蜂鸣器用于接收主机距离数据,并依照距离的远近显示距离值,同时能提供不同级别的距离报警音。
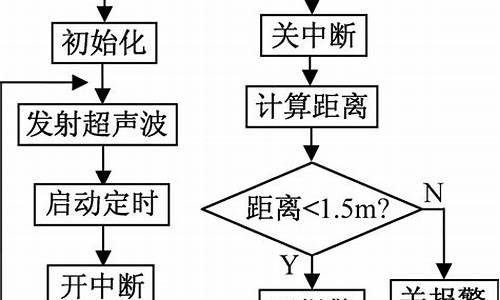
倒车雷达的工作原理是倒车雷达由主机控制,传感器发射超声波信号,若遇到障碍物就会有回波信号,传感器经主机对收到的回波信号进行数据处理并判断出障碍物的位置,由显示器显示距离并发出其他警示信号,得到及时警示,驾驶人倒车时能了解到具体情况,倒车时会更加安全。
倒车 雷达 怎么样
你可以去你自己学校的图书馆电脑进中国一些论文的数据库查 肯定会有的 比如ki.net/grid20/Navi/Navi.aspx?NaviID=1
/information.htm
倒车雷达如何使用
倒车雷达是汽车倒车安全的重要组成部分,它可以提高汽车倒车时的安全性,让驾驶者更安心的倒车。它的功能是,当汽车与障碍物的距离小于某个值时,就会发出警报,提醒驾驶者注意,避免发生意外。1.倒车雷达分类
倒车雷达的分类主要有两种,一种是传统的雷达,一种是摄像头雷达。传统的雷达可以检测物体的距离,但它的检测范围有限,只能检测到1米以内的物体,而摄像头雷达可以检测到10米以内的物体,更具有预警能力,而且能够显示物体的形状,方便驾驶者知晓障碍物的状况。
2.倒车雷达的优势
倒车雷达具有良好的安全性和可靠性,它可以在汽车倒车时及时发出警报,提醒驾驶者和行人注意,避免发生事故;而且它可以在复杂的环境中运行,即使是夜晚,雨天等恶劣天气,它也能正常工作,可以帮助驾驶者在较小的空间内安全倒车。
3.倒车雷达的劣势
倒车雷达的劣势也不可忽视,首先,它的价格比较高,安装也比较麻烦;其次,倒车雷达的警报提示有时会有误差,而且它的检测范围也有限,安装的位置也有一定的限制,不能随意安装。
4.倒车雷达品牌介绍
汽车倒车雷达有很多知名品牌,其中最受欢迎的是美国安维尔斯特和日本萨利科技。这两个品牌的倒车雷达都具有良好的质量和性能,让汽车倒车更加安全,而且价格也比较实惠,是非常不错的选择。
5.倒车雷达的安装
倒车雷达的安装需要注意的是,安装的位置不能太靠近尾部,以免影响雷达的检测范围;而且倒车雷达的安装位置也要避开汽车尾部的尾灯,以免发出的警报被尾灯信号所干扰。此外,安装之前还要确保雷达的电源线接得牢固,以免影响雷达的正常运行。
综上所述,汽车倒车雷达是汽车倒车安全的重要组成部分,它具有良好的安全性和可靠性,可以及时发出警报,提醒驾驶者和行人注意,避免发生事故;而且它的安装还要注意安装位置的正确性,以保证雷达的正常运行。另外,还有很多知名的倒车雷达品牌,像安维尔斯特和萨利科技,都是不错的选择。
汽车倒车雷达的组成是什么?
倒车时会出现提示音,离障碍物越近,提示音越急促,驾驶员要根据周围环境和雷达提示音谨慎倒车。倒车雷达在倒车时,利用超声波原理,由装置在车尾保险杠上的探头发送超声波撞击障碍物后反射此声波,计算出车体与障碍物间的实际距离,然后提示给司机。
倒车雷达以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员驻车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷。
扩展资料
倒车注意事项
1、观察周围环境
倒车前应先看清车后情况,估计好倒车路线,确定倒车过程中车头是否会碰到障碍物。特别在方向盘转动幅度大时,汽车转向轮转弯半径大于后轮转弯半径,倒车时车头部位向外甩的幅度也大,这时一定要注意避免刮碰车头。
2、随时修正倒车路线
倒车时不要一直看着车后,确认车后安全的前提下,应不时观察左右侧倒车镜,注意障碍物与车身之间的距离,并据此利用方向盘来修正车身后退时的位置。
3、注意油门控制
倒车时尽量不要加油门,控制好车速不要太快。
百度百科—倒车雷达
百度百科—倒车
电子工程毕业论文
汽车倒车雷达主要由感应器(探头)、主机、显示设备等几部分组成。以下是汽车倒车雷达的相关介绍:1、倒车雷达的原理:倒车雷达的原理与普通雷达一样是根据蝙蝠在黑夜里高速飞行而不会与任何障碍物相撞的原理设计开发。通过感应装置发出超声波然后通过反射回来的超声波来判断前方是否有障碍物以及障碍物的距离、大小、方向、形状等。但是目前由于倒车雷达体积大小及实用性的限制其主要功能仅为判断障碍物与车的距离并作出提示。2、倒车雷达的分类:根据感应器种类不同倒车雷达可分为粘贴式、钻孔式和悬挂式3种。
液压伺服系统设计
液压伺服系统设计
在液压伺服系统中采用液压伺服阀作为输入信号的转换与放大元件。液压伺服系统能以小功率的电信号输入,控制大功率的液压能(流量与压力)输出,并能获得很高的控制精度和很快的响应速度。位置控制、速度控制、力控制三类液压伺服系统一般的设计步骤如下:
1)明确设计要求:充分了解设计任务提出的工艺、结构及时系统各项性能的要求,并应详细分析负载条件。
2)拟定控制方案,画出系统原理图。
3)静态计算:确定动力元件参数,选择反馈元件及其它电气元件。
4)动态计算:确定系统的传递函数,绘制开环波德图,分析稳定性,计算动态性能指标。
5)校核精度和性能指标,选择校正方式和设计校正元件。
6)选择液压能源及相应的附属元件。
7)完成执行元件及液压能源施工设计。
本章的内容主要是依照上述设计步骤,进一步说明液压伺服系统的设计原则和介绍具体设计计算方法。由于位置控制系统是最基本和应用最广的系统,所以介绍将以阀控液压缸位置系统为主。
4.1 全面理解设计要求
4.1.1 全面了解被控对象
液压伺服控制系统是被控对象—主机的一个组成部分,它必须满足主机在工艺上和结构上对其提出的要求。例如轧钢机液压压下位置控制系统,除了应能够承受最大轧制负载,满足轧钢机轧辊辊缝调节最大行程,调节速度和控制精度等要求外,执行机构—压下液压缸在外形尺寸上还受轧钢机牌坊窗口尺寸的约束,结构上还必须保证满足更换轧辊方便等要求。要设计一个好的控制系统,必须充分重视这些问题的解决。所以设计师应全面了解被控对象的工况,并综合运用电气、机械、液压、工艺等方面的理论知识,使设计的控制系统满足被控对象的各项要求。
4.1.2 明角设计系统的性能要求
1)被控对象的物理量:位置、速度或是力。
2)静态极限:最大行程、最大速度、最大力或力矩、最大功率。
3)要求的控制精度:由给定信号、负载力、干扰信号、伺服阀及电控系统零飘、非线性环节(如摩擦力、死区等)以及传感器引起的系统误差,定位精度,分辨率以及允许的飘移量等。
4)动态特性:相对稳定性可用相位裕量和增益裕量、谐振峰值和超调量等来规定,响应的快速性可用载止频率或阶跃响应的上升时间和调整时间来规定;
5)工作环境:主机的工作温度、工作介质的冷却、振动与冲击、电气的噪声干扰以及相应的耐高温、防水防腐蚀、防振等要求;
6)特殊要求;设备重量、安全保护、工作的可靠性以及其它工艺要求。
4.1.3 负载特性分析
正确确定系统的外负载是设计控制系统的一个基本问题。它直接影响系统的组成和动力元件参数的选择,所以分析负载特性应尽量反映客观实际。液压伺服系统的负载类型有惯性负载、弹性负载、粘性负载、各种摩擦负载(如静摩擦、动摩擦等)以及重力和其它不随时间、位置等参数变化的恒值负载等。
4.2 拟定控制方案、绘制系统原理图
在全面了解设计要求之后,可根据不同的控制对象,按表6所列的基本类型选定控制方案并拟定控制系统的方块图。如对直线位置控制系统一般采用阀控液压缸的方案,方块图如图36所示。
图36 阀控液压缸位置控制系统方块图
表6 液压伺服系统控制方式的基本类型
伺服系统 控制信号 控制参数 运动类型 元件组成
机液
电液
气液
电气液 模拟量
数字量
位移量 位置、速度、加速度、力、力矩、压力 直线运动
摆动运动
旋转运动 1.阀控制:阀-液压缸,阀-液压马达
2.容积控制:变量泵-液压缸;变量泵-液压马达;阀-液压缸-变量泵-液压马达
3.其它:步近式力矩马达
4.3 动力元件参数选择
动力元件是伺服系统的关键元件。它的一个主要作用是在整个工作循环中使负载按要求的速度运动。其次,它的主要性能参数能满足整个系统所要求的动态特性。此外,动力元件参数的选择还必须考虑与负载参数的最佳匹配,以保证系统的功耗最小,效率高。
动力元件的主要参数包括系统的供油压力、液压缸的有效面积(或液压马达排量)、伺服阀的流量。当选定液压马达作执行元件时,还应包括齿轮的传动比。
4.3.1 供油压力的选择
选用较高的供油压力,在相同输出功率条件下,可减小执行元件——液压缸的活塞面积(或液压马达的排量),因而泵和动力元件尺寸小重量轻,设备结构紧凑,同时油腔的容积减小,容积弹性模数增大,有利于提高系统的响应速度。但是随供油压力增加,由于受材料强度的限制,液压元件的尺寸和重量也有增加的趋势,元件的加工精度也要求提高,系统的造价也随之提高。同时,高压时,泄漏大,发热高,系统功率损失增加,噪声加大,元件寿命降低,维护也较困难。所以条件允许时,通常还是选用较低的供油压力。
常用的供油压力等级为7MPa到28MPa,可根据系统的要求和结构限制条件选择适当的供油压力。
4.3.2 伺服阀流量与执行元件尺寸的确定
如上所述,动力元件参数选择除应满足拖动负载和系统性能两方面的要求外,还应考虑与负载的最佳匹配。下面着重介绍与负载最佳匹配问题。
(1)动力元件的输出特性
将伺服阀的流量——压力曲线经坐标变换
绘于υ-FL平面上,所得的抛物线即为动力元件稳态时的输出特性,见图37。
图37 参数变化对动力机构输出特性的影响
a)供油压力变化;b)伺服阀容量变化;c)液压缸面积变化
图中 FL——负载力,FL=pLA;
pL——伺服阀工作压力;
A——液压缸有效面积;
υ——液压缸活塞速度,
qL——伺服阀的流量;
q0——伺服阀的空载流量;
ps——供油压力。
由图37可见,当伺服阀规格和液压缸面积不变,提高供油压力,曲线向外扩展,最大功率提高,最大功率点右移,如图37a。
当供油压力和液压缸面积不变,加大伺服阀规格,曲线变高,曲线的顶点A ps不变,最大功率提高,最大功率点不变,如图37b。
当供油压力和伺服阀规格不变,加大液压缸面积A,曲线变低,顶点右移,最大功率不变,最大功率点右移,如图37c。
(2)负载最佳匹配图解法
在负载轨迹曲线υ-FL平面上,画出动力元件输出特性曲线,调整参数,使动力元件输出特性曲线从外侧完全包围负载轨迹曲线,即可保证动力元件能够拖动负载。在图38中,曲线1、2、3代表三条动力元件的输出特性曲线。曲线2与负载轨迹最大功率点c相切,符合负载最佳匹配条件,而曲线1、3上的工作点α和b,虽能拖动负载,但效率都较低。
(3)负载最佳匹配的解析法
参见液压动力元件的负载匹配。
(4)近似计算法
在工程设计中,设计动力元件时常采用近似计算法,即按最大负载力FLmax选择动力元件。在动力元件输出特性曲线上,限定
FLmax≤pLA=
,并认为负载力、最大速度和最大加速度是同时出现的,这样液压缸的有效面积可按下式计算:
(37)
图38 动力元件与负载匹配图形
按式37求得A值后,可计算负载流量qL,即可根据阀的压降从伺服阀样本上选择合适的伺服阀。近似计算法应用简便,然而是偏于保守的计算方法。采用这种方法可以保证系统的性能,但传递效率稍低。
(5)按液压固有频率选择动力元件
对功率和负载很小的液压伺服系统来说,功率损耗不是主要问题,可以根据系统要求的液压固有频率来确定动力元件。
四边滑阀控制的液压缸,其活塞的有效面积为
(38)
二边滑阀控制的液压缸,其活塞的有效面积为
(39)
液压固有频率ωh可以按系统要求频宽的(5~10)倍来确定。对一些干扰力大,负载轨迹形状比较复杂的系统,不能按上述的几种方法计算动力元件,只能通过作图法来确定动力元件。
计算阀控液压马达组合的动力元件时,只要将上述计算方法中液压缸的有效面积A换成液压马达的排量D,负载力FL换成负载力矩TL,负载速度换成液压马达的角速度 ,就可以得到相应的计算公式。当系统采用了减速机构时,应注意把负载惯量、负载力、负载的位移、速度、加速度等参数都转换到液压马达的轴上才能作为计算的参数。减速机构传动比选择的原则是:在满足液压固有频率的要求下,传动比最小,这就是最佳传动比。
4.3.3 伺服阀的选择
根据所确定的供油压力ps和由负载流量qL(即要求伺服阀输出的流量)计算得到的伺服阀空载流量q0,即可由伺服阀样本确定伺服阀的规格。因为伺服阀输出流量是限制系统频宽的一个重要因素,所以伺服阀流量应留有余量。通常可取15%左右的负载流量作为伺服阀的流量储备。
除了流量参数外,在选择伺服阀时,还应考虑以下因素:
1)伺服阀的流量增益线性好。在位置控制系统中,一般选用零开口的流量阀,因为这类阀具有较高的压力增益,可使动力元件有较大的刚度,并可提高系统的快速性与控制精度。
2)伺服阀的频宽应满足系统频宽的要求。一般伺服阀的频宽应大于系统频宽的5倍,以减小伺服阀对系统响应特性的影响。
3)伺服阀的零点漂移、温度漂移和不灵敏区应尽量小,保证由此引起的系统误差不超出设计要求。
4)其它要求,如对零位泄漏、抗污染能力、电功率、寿命和价格等,都有一定要求。
4.3.4 执行元件的选择
液压伺服系统的执行元件是整个控制系统的关键部件,直接影响系统性能的好坏。执行元件的选择与设计,除了按本节所述的方法确定液压缸有效面积A(或液压马达排量D)的最佳值外,还涉及密封、强度、摩擦阻力、安装结构等问题。
4.4 反馈传感器的选择
根据所检测的物理量,反馈传感器可分为位移传感器、速度传感器、加速度传感器和力(或压力)传感器。它们分别用于不同类型的液压伺服系统,作为系统的反馈元件。闭环控制系统的控制精度主要决定于系统的给定元件和反馈元件的精度,因此合理选择反馈传感器十分重要。
传感器的频宽一般应选择为控制系统频宽的5~10倍,这是为了给系统提供被测量的瞬时真值,减少相位滞后。传感器的频宽对一般系统都能满足要求,因此传感器的传递函数可近似按比例环节来考虑。
4.5 确定系统方块图
根据系统原理图及系统各环节的传递函数,即可构成系统的方块图。根据系统的方块图可直接写出系统开环传递函数。阀控液压缸和阀控液压马达控制系统二者的传递函数具有相同的结构形式,只要把相应的符号变换一下即可。
4.6 绘制系统开环波德图并确定开环增益
系统的动态计算与分析在这里是采用频率法。首先根据系统的传递函数,求出波德图。在绘制波德图时,需要确定系统的开环增益K。
改变系统的开环增益K时,开环波德图上幅频曲线只升高或降低一个常数,曲线的形状不变,其相频曲线也不变。波德图上幅频曲线的低频段、穿越频率以及幅值增益裕量分别反映了闭环系统的稳态精度、截止频率及系统的稳定性。所以可根据闭环系统所要求的稳态精度、频宽以及相对稳定性,在开环波德图上调整幅频曲线位置的高低,来获得与闭环系统要求相适应的K值。
4.6.1 由系统的稳态精度要求确定K
由控制原理可知,不同类型控制系统的稳态精度决定于系统的开环增益。因此,可以由系统对稳态精度的要求和系统的类型计算得到系统应具有的开环增益K。
4.6.2由系统的频宽要求确定K
分析二阶或三阶系统特性与波德图的关系知道,当ζh和K/ωh都很小时,可近似认为系统的频宽等于开环对数幅值曲线的穿越频率,即ω-3dB≈ωc,所以可绘制对数幅频曲线,使ωc在数值上等于系统要求的ω-3dB值,如图39所示。由此图可得K值。
图39 由ω-3dB绘制开环对数幅频特性
a)0型系统;b)I型系统
4.6.3 由系统相对稳定性确定K
系统相对稳定性可用幅值裕量和相位裕量来表示。根据系统要求的幅值裕量和相位裕量来绘制开环波德图,同样也可以得到K。见图40。
实际上通过作图来确定系统的开环增益K,往往要综合考虑,尽可能同时满足系统的几项主要性能指标。
4.7 系统静动态品质分析及确定校正特性
在确定了系统传递函数的各项参数后,可通过闭环波德图或时域响应过渡过程曲线或参数计算对系统的各项静动态指标和误差进行校核。如设计的系统性能不满足要求,则应调整参数,重复上述计算或采用校正环节对系统进行补偿,改变系统的开环频率特性,直到满足系统的要求。
4.8 仿真分析
在系统的传递函数初步确定后,可以通过计算机对该系统进行数字仿真,以求得最佳设计。目前有关于数字仿真的商用软件,如Matlab软件,很适合仿真分析。
好了,今天关于“汽车倒车雷达设计论文参考”的话题就讲到这里了。希望大家能够通过我的介绍对“汽车倒车雷达设计论文参考”有更全面、深入的认识,并且能够在今后的实践中更好地运用所学知识。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。